Controlador para motor paso a paso SMSD‑4.2LAN
Voltaje
24 - 48 VDC
Corriente de fase máxima
0.1 - 4.2 A
Fracción de paso
1/1 - 1/128
Métodos de control
programa, entrada analogica, STEP/DIR
Interfaces
Ethernet TCP/IP, USB
SMSD-4.2LAN puede controlarse mediante comandos a través de Ethernet TCP/IP, por lo que puede conectarse a una red local, lo que permite controlar el accionamiento de forma remota. El controlador ofrece 5 métodos de control: control en tiempo real mediante comandos, modo de programa, STEP/DIR, control analógico de velocidad o de posición. El controlador admite funcionamiento autónomo de acuerdo con un programa de usuario predefinido. La función de avance automático proporciona un funcionamiento automatizado de alto rendimiento de una máquina industrial.
Para los controladores SMSD-4.2LAN están disponibles dos versiones de firmware: estándar y Modbus TCP/IP. La versión Modbus TCP/IP está disponible únicamente bajo pedido y debe indicarse específicamente al realizar el pedido.
Datos técnicos
Entradas de control:
Nivel de alto voltaje
4 - 5 VDC
Nivel de voltaje bajo
0 - 1 VDC
Resistencia de entrada
1 kOhm, no less
Salida interna +5VDC:
Voltaje
4.5 – 5.5 VDC
Corriente de carga máxima
200 mA
Resistencia de salida
50 Ohm
Emite los parámetros ALARM y FAULT:
Escribe
salida del optoacoplador
Voltaje maximo
20 VDC
Corriente maxima
100 mA
Resistencia al contacto cercano
100 Ohm
Entradas de control:
Nivel de alto voltaje
4 - 5 VDC
Nivel de voltaje bajo
0 - 1 VDC
Resistencia de entrada
1 kOhm, no less
Salida interna +5VDC:
Voltaje
4.5 – 5.5 VDC
Corriente de carga máxima
200 mA
Resistencia de salida
50 Ohm
Emite los parámetros ALARM y FAULT:
Escribe
salida del optoacoplador
Voltaje maximo
20 VDC
Corriente maxima
100 mA
Resistencia al contacto cercano
100 Ohm
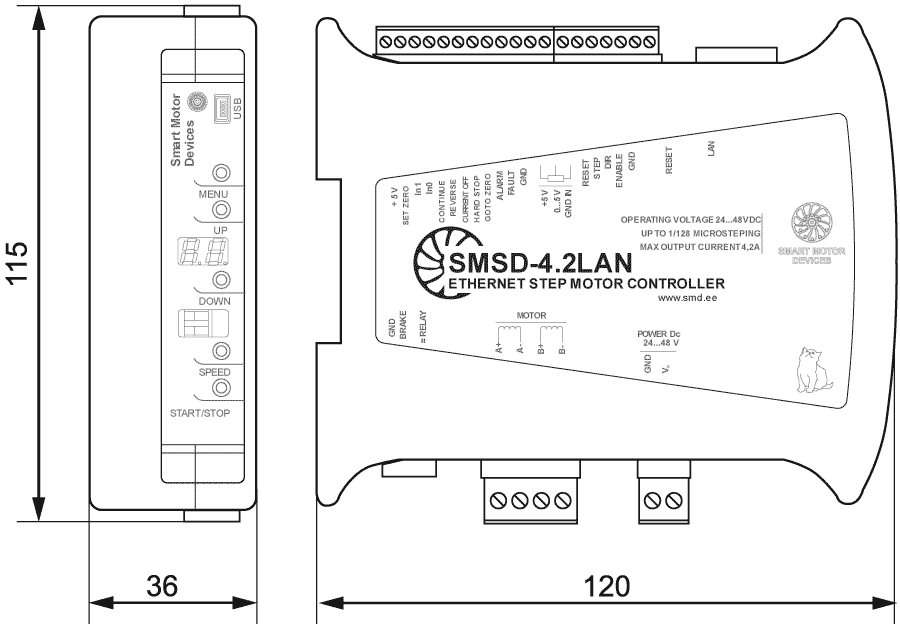
Dimensiones del controlador de motor paso a paso SMSD‑4.2LAN
Descripción del controlador de motor paso a paso SMSD‑4.2LAN
Funcionamiento suave del motor paso a paso con el controlador SMSD‑4.2LAN
Control de velocidad analógico mediante potenciómetro interno o externo, o señal de voltaje analógica de 0 a 5 V. También es posible la regulación de velocidad mediante señal PWM. Al usar una señal PWM externa, la velocidad del motor es proporcional al nivel de voltaje efectivo aplicado a la entrada SPEED. (Parámetros recomendados para la señal PWM: F = 5 kHz, amplitud = 5 V).
Funciones y capacidades del controlador de motor paso a paso SMSD‑4.2LAN:
- Control remoto del motor paso a paso a través de la red Ethernet;
- Funcionamiento autónomo y control del motor paso a paso según uno de los 4 programas independientes almacenados en la memoria del controlador;
- Control en tiempo real del motor paso a paso mediante comandos desde un PLC o computadora vía Ethernet o USB;
- Control por software del relé;
- Control de posición por pulsos con señales estándar STEP, DIRECTION y ENABLE;
- Control de velocidad analógico: utilizando potenciómetro externo o incorporado, o señal de voltaje analógica de 0 a 5 V;
- Control analógico del ángulo de rotación del motor: mediante potenciómetro externo o incorporado, señal de voltaje analógica de 0 a 5 V;
- Función de avance automático para sistemas industriales
- Se proporciona la función de memorización de la posición actual y transición a la posición memorizada;
- Se prevé detener el motor al recibir una señal de emergencia;
- Se prevé cambiar la dirección de rotación del motor al recibir una señal de reversa;
- La sincronización de acciones de varios controladores se realiza mediante señales de entrada y salida externas y comandos especiales;
- Los parámetros de control del motor (corriente de fase, corriente de retención, micropasos, modo de control) se configuran mediante un panel externo y el menú de la unidad, o a través de una interfaz de comunicación (Ethernet o USB);
- Control del voltaje de entrada: si el valor del voltaje de alimentación supera los valores permitidos (menos de 20 V o más de 51 V), el controlador genera una señal de alarma;
- El controlador dispone de un circuito de frenado interno con posibilidad de conectar una resistencia de frenado externa;
- Se proporciona señal sonora para situaciones críticas;
- El controlador cuenta con un indicador de siete segmentos de dos dígitos integrado para configuración, visualización de situaciones críticas y modos de operación del controlador;
- Se utiliza una contraseña de 32 bits para proteger el acceso a la red local con un intervalo de autorización de 1 s (136 años para búsqueda por fuerza bruta de las opciones de contraseña).
Modos de control del controlador SMSD‑4.2LAN:
- Modo de programa: funcionamiento autónomo de acuerdo con uno de los 4 programas de usuario almacenados en la memoria;
- Modo de control directo: control mediante comandos en tiempo real;
- Control de velocidad analógico;
- Control de posicionamiento analógico: ajuste del ángulo;
- Control de posición por pulsos mediante señales STEP y DIRECTION.
Conexión del controlador de motor paso a paso SMSD‑4.2LAN
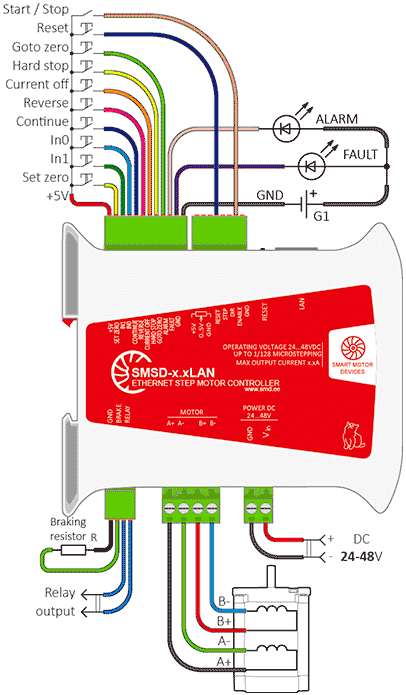
Ejemplo de conexión del controlador SMSD‑4.2LAN en modo de control de programa y en modo de control directo
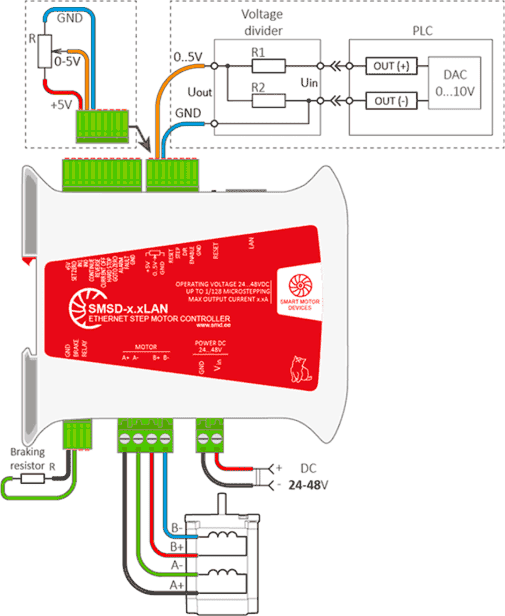
Ejemplo de conexión del controlador SMSD‑4.2LAN en el modo de control analógico de velocidad y posición (ángulo)
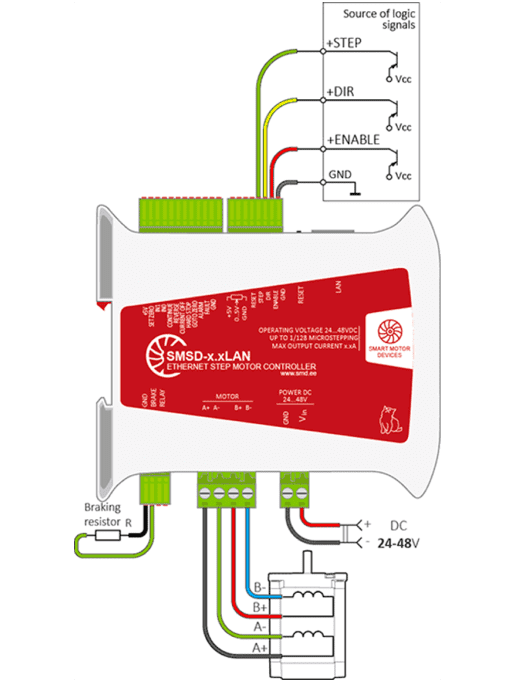
Ejemplo de conexión del controlador SMSD‑4.2LAN modo de control de posición de pulso STEP/DIR
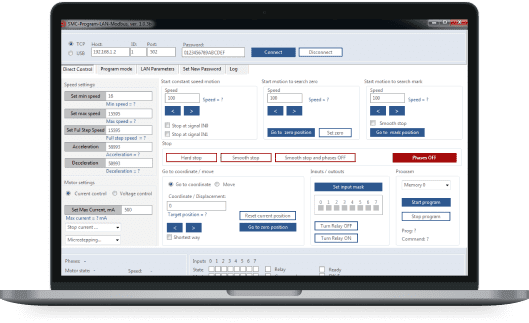
Software para controlador de motor paso a paso SMSD‑4.2LAN
Es posible utilizar un protocolo de comunicación abierto o un software listo para usar para los controladores de motor paso a paso SMSD‑4.2LAN. Hay dos versiones de software: SMC-Program-LAN para controladores con firmware estándar y SMC-Program-LAN Modbus para controladores con firmware para Modbus TCP/IP.
Ambas versiones de software proporcionan conexión y control de accionamiento de los dispositivos conectados a través de una interfaz Ethernet o USB.
El software permite conectar el controlador a través de Ethernet o USB, administrar la operación, leer y escribir programas ejecutivos del usuario en la memoria del controlador, cambiar la configuración de control y los parámetros del motor, así como leer y cambiar la configuración de transmisión de datos a través de TCP/IP. Para trabajar con el variador, el software proporciona dos modos de control: control en tiempo real (control directo) o grabación de una secuencia de comandos en la memoria del controlador (control de programa).